Curiosity Blog, Sols 4641-4648: Thinking Outside and Inside the ‘Boxwork’

4 min read
Curiosity Blog, Sols 4641-4648: Thinking Outside and Inside the ‘Boxwork’

Written by Ashley Stroupe, Mission Operations Engineer and Rover Planner at NASA’s Jet Propulsion Laboratory
Earth planning week: Aug. 25, 2025.
This week Curiosity has been exploring the boxwork unit, investigating both the ridges and the hollows to better characterize them and understand how they may have formed. We’ve been doing lots of remote science, contact science, and driving in each plan. In addition, we have our standard daily environmental observations to look at dust in the atmosphere. We can still see distant targets like the crater rim, but temperatures will soon begin to warm up as we start moving into a dustier part of the year. And after each drive, we also use AEGIS to do some autonomous target selection for ChemCam observations. I was the arm rover planner for the 4645-4648 plan on Friday.
For Monday’s plan (sols 4641-4642), after a successful weekend drive Curiosity began on the edge of a boxwork ridge. We did a lot of imaging, including Mastcam mosaics of “El Alto,” an upturned rock near a wheel, the ridge forming the south side of the Mojo hollow, “Sauces,” our contact science target, and “Navidad,” an extension of our current workspace. We also took ChemCam LIBS of Sauces and an RMI mosaic. The rover planners did not find any bedrock large enough to brush, but did MAHLI and APXS on Sauces. Ready to drive, Curiosity drove about 15 meters (about 49 feet) around the ridge to the south and into the next hollow, named “Mojo.”
In Wednesday’s plan (sols 4643-4644), Curiosity was successfully parked in the Mojo hollow. We started with a lot of imaging, including Mastcam mosaics of the ridges around the Mojo hollow, a nearby trough and the hollow floor to look for regolith movement. We also imaged a fractured float rock named “La Laguna Verde.” ChemCam planned a LIBS target on “Corani,” a thin resistant clast sticking out of the regolith, a RMI mosaic of a target on the north ridge named “Cocotoni,” and a long-distance RMI mosaic of “Babati Mons,” a mound about 100 kilometers (about 62 miles) away that we can see peeking over the rim of Gale crater! With no bedrock in the workspace, the rover planners did MAHLI and APXS observations on a regolith target named “Tarapacá.” The 12-meter drive in this plan (about 39 feet) was challenging; driving out of the hollow and up onto the ridge required the rover to overcome tilts above 20 degrees, where the rover can experience a lot of slip. Also, with the drive late in the day, it was challenging to determine where Curiosity should be looking to track her slip using Visual Odometry without getting blinded by the sun or losing features in shadows. Making sure VO works well is particularly important on drives like this when we expect a lot of slip.
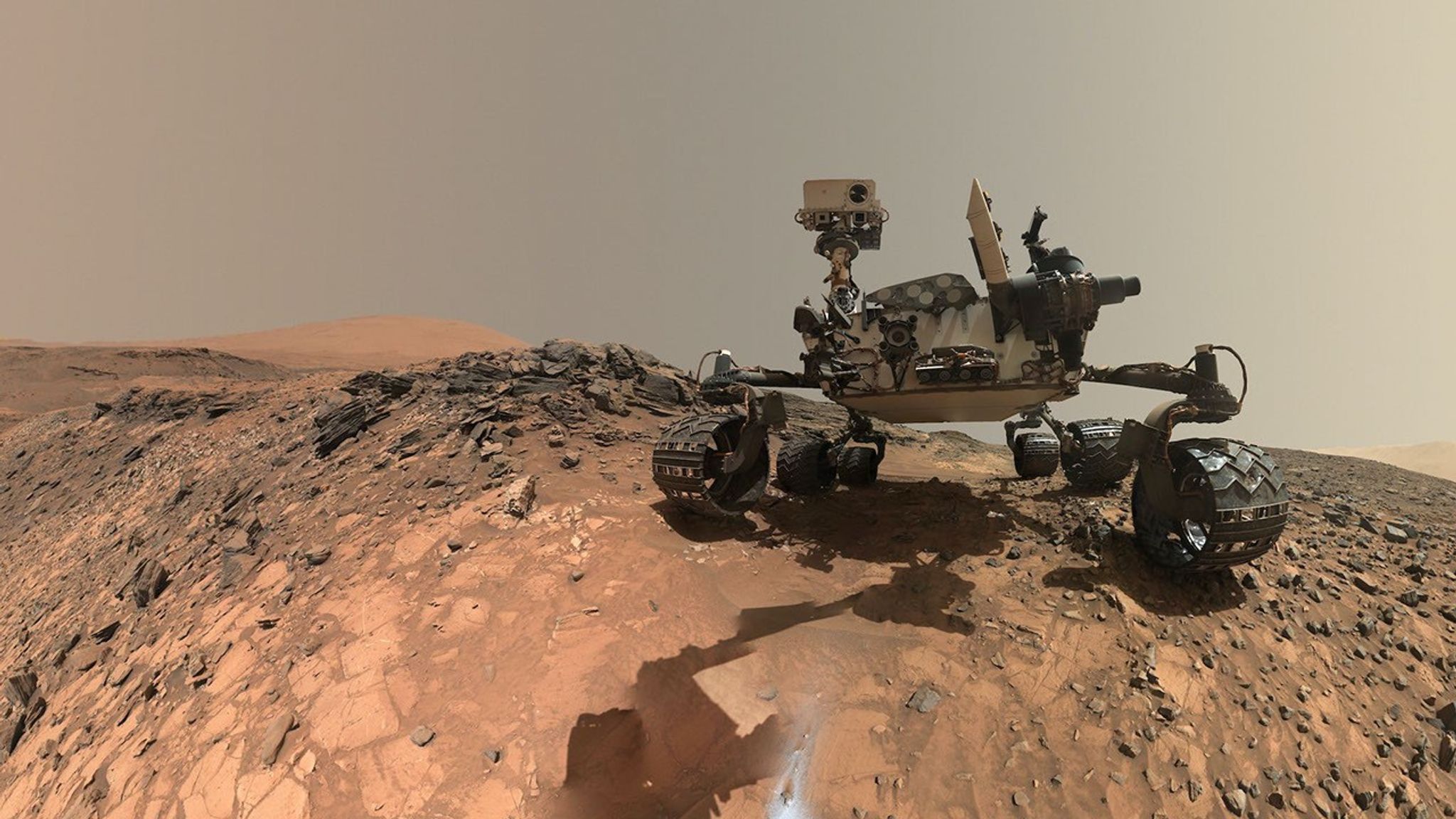
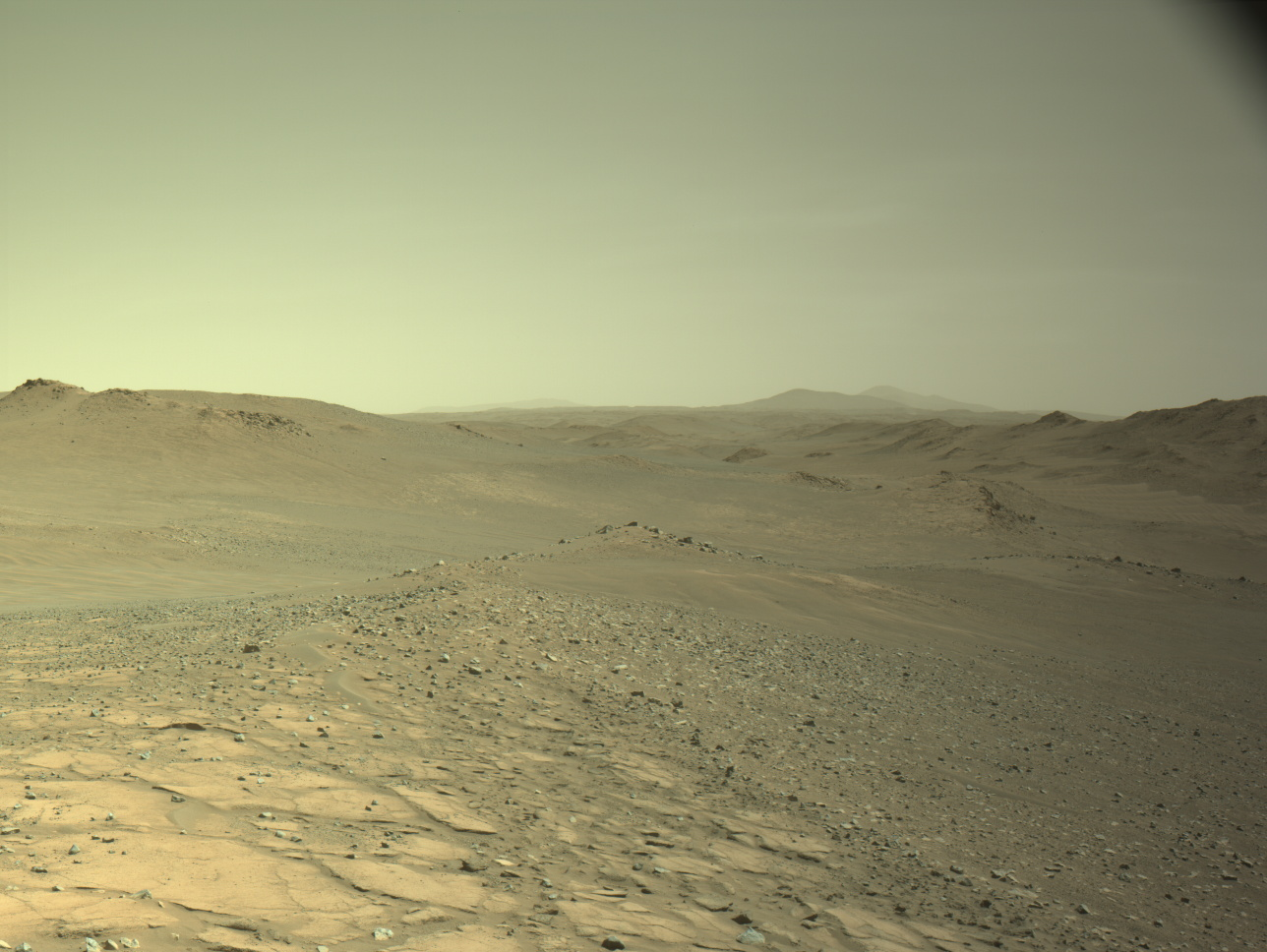
Friday’s plan, like most weekend plans, was more complex — particularly because this four-sol plan also covers the Labor Day holiday on Monday. Fortunately, the Wednesday drive was successful, and we reached the desired parking location on the ridge south of Mojo for imaging and contact science. The included image looks back over the rover’s shoulder, where we can see the ridge and hollow. We took a lot of imaging looking at hollows and the associated ridges. We are taking a Mastcam mosaic of “Jorginho Cove,” a target covering the ridge we are parked on and the next hollow to the south, “Pica,” a float rock that is grayish in color, and a ridge/hollow pair named “Laguna Colorada.” We also take ChemCam LIBS observations of Pica and two light-toned pieces of bedrock named “Tin Tin” and ”Olca.” ChemCam takes RMI observations of “Briones,” which is a channel on the crater rim, “La Serena,” some linear features in the crater wall, and a channel that feeds into the Peace Vallis fan.
After a week of fairly simple arm targets, the rover planners had a real challenge with this workspace. The rocks were mostly too small and too rough to brush, but we did find one spot after a lot of looking. We did DRT, APXS, and MAHLI on this spot, named “San Jose,” and also did MAHLI and APXS on another rock named “Malla Qullu.” This last drive of the week is about 15 meters (about 49 feet) following along a ridge and then driving onto a nearby one.
Share
Details
Related Terms
Explore More





What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Angry
0
Angry
0
 Sad
0
Sad
0
 Wow
0
Wow
0